GraphNav Area Callbacks
Introduction
Imagine we want Spot to check for forklifts before deciding to cross the road. If this is part of a mission, we could add a remote mission callback service that makes the robot to look left and right before crossing the road, where the robot’s vision is connected to an ML model that checks for the forklift on the road. However, this approach will only execute the callback when it is at that point in the mission. In cases where the robot reroutes across the crosswalk due to a blockage elsewhere, or the robot decides to return to a dock across the crosswalk when its battery is low, or if the map is used for navigation outside of that mission, the robot will not execute that callback, but will instead walk directly out into the crosswalk, regardless of whether it is safe to do so.
We sometimes want the robot to execute a sequence of actions anytime the robot is at the certain location in the map. That is where we can use Area Callbacks. An Area Callback allows the user to associate certain areas with specified actions, such as safety checks at the crosswalks, opening doors, and signaling the environment using the lights and sounds.
How does an Area Callback work?
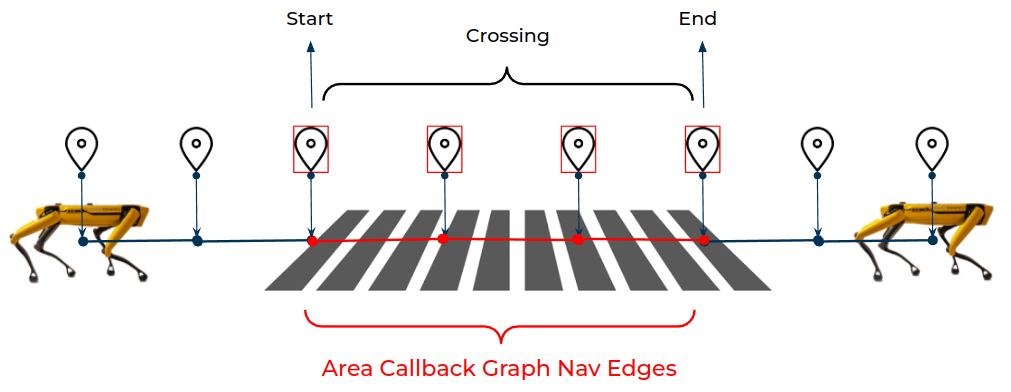
GraphNav maps are composed of edges and waypoints. These edges are annotated with information that is necessary for the successful navigation of the robot. In addition to information such as detected stairs and different friction coefficient settings for slippery surfaces, annotations can include Area Callback Regions so that robot can complete assigned actions every time it visits these edges. These regions specify which Area Callback Service should be called to handle this region.
We may want the robot to do different things for each of the following cases:
the robot gets to the start of the Area Callback region
the robot is crossing the Area Callback region
the robot gets to the end of the Area Callback region
The Area Callback service that is called can specify a policy as to what should GraphNav should do at the start and end of the region. Options include continuing on, stopping and waiting for the callback to allow it to continue, or delegating control to the callback to perform an action with the robot.
Area Callback Policies
Policies specify what should happen at the beginning and end of an Area Callback region. Setting the policy for the start of a region after it has already passed will have no effect.
Stop. Navigation will pause at the target position indefinitely until the policy is changed.
Control. When the target position is reached, control will be transferred to the Area Callback service. The service will retain control until the service changes its policy.
Continue On. Navigation may continue past the target position. If this policy is set before the position is reached, the robot will continue past without stopping. Setting this policy at the start of a region will continue to update the callback service throughout the region. In contrast, reporting that the callback is complete will stop updating a callback altogether.
Example: Crosswalk SpotCAM Light
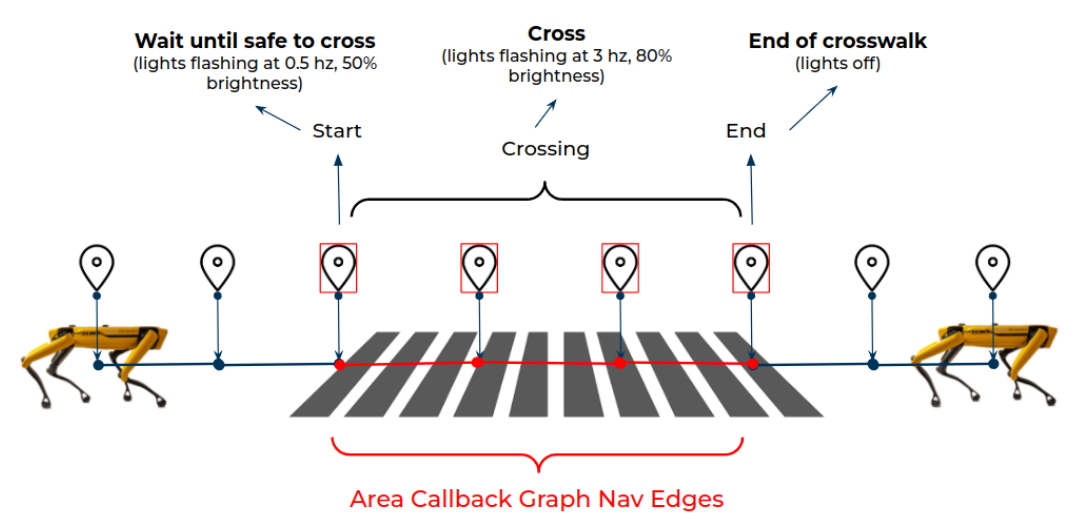
the robot gets to the start of the callback (Area Callback region)
the robot waits and checks its surrounding for the forklift (ML example included as pseudocode), during which it flashes the lights of the SpotCAM slowly.
once the robot confirms that the crosswalk is clear of forklifts, it starts crossing the region, during which it flashes the lights quickly and brighter.
the robot reaches the end to turn off the SpotCAM light and proceed to complete the rest of the mission
For this example, the callback will set a policy to tell the robot to stop at the start of the region. After the callback verified that it is safe to cross, it would change the policy to continue on past the start and continue on past the end. The callback will still continue to be updated by graph nav for the duration of the region traversal, so that it can continue flashing the lights throughout the region.
Code implementing this callback can be found in the python example.
The Life Cycle of an Area Callback
An Area Callback is a gRPC service implementing the AreaCallbackService definition. It responds to RPC calls to describe itself, and to execute actions during navigation.
Startup
The callback service launches and creates the gRPC service.
The callback service registers itself with the robot’s directory.
GraphNav calls the
AreaCallbackInformationRPC to get information about this callback.
At this point the callback is “live”, meaning that it is running an GraphNav has successfully contacted it.
Recording
When recording a map, the tablet shows Area Callbacks similarly to other actions that can be triggered during a mission.
Execution
When reaching an Area Callback region, GraphNav will begin calling out to the callback service.
BeginCallback: This call lets the callback know that the region is beginning, and includes the region id and the route through the region.
UpdateCallback: This call will include the stage of traversal through the region, and the response to this call sets the current policy for the callback. This RPC is repeated regularly for the entire traversal of the region, and the callback can update its policy appropriately as things change.
BeginControl: This call transfers control of the robot to the callback with a Lease. The callback remains in control until it either changes its policy (via
UpdateCallback) to no longer request control, or it receives a LeaseUseResult through its lease usage that indicates that some other system is now in control of the robot.EndCallback: Called either when leaving the region, or when the response to
UpdateCallbackindicates that the callback is complete.UpdateCallbackwill no longer be called.EndCallbackmay also be called early if GraphNav is interrupted and is no longer executing the route.
Service Shutdown
If shutting down an Area Callback service, the service should unregister itself from the directory. This will be handled automatically when using the python DirectoryRegistrationKeepAlive helper.
Creating an Area Callback
Implementing an Area Callback is accomplished through writing and registering an AreaCallbackService. The recommended way to write this service is to inherit from the python helper class AreaCallbackRegionHandlerBase and implement the begin(), run(), and end() methods, and then use that class with the AreaCallbackServiceServicer and GrpcServiceRunner to run the service. Python examples are available.
When using the AreaCallbackServiceServicer, The normal usage is to pass in the newly implemented AreaCallbackRegionHandlerBase subclass as the area_callback_builder_fn.
This function is called fresh for each region that the callback is used to cross. As a result, a new instance of the class will be created for each region. If your use case requires sharing data across regions, you can define a function with the correct interface that will create your subclass with the correct shared data. Note that the AreaCallbackRegionHandlerBase class expects to be recreated fresh for each region, and so it is not recommended to use an area_callback_builder_fn that always returns the same instance.
Configuring behavior for a callback
The behavior of GraphNav during an Area Callback can be modified by setting various fields in the AreaCallbackInformation message that GraphNav will query for. It is best practice to set all the available configuration options, even if the default behavior is the desired behavior.
Expected Blockages
Certain callback regions may be expected to appear blocked to GraphNav (such as a callback that opens a door). In those cases, GraphNav should not pre-emptively consider them blocked until the callback has had a chance to run. This is specified by setting the blockage field to BLOCKAGE_SKIP or BLOCKAGE_CHECK.
Impairment Check
GraphNav regularly monitors robot state and will set an error state if the robot becomes impaired in such a way that GraphNav can no longer function. However, interrupting a callback in the middle of controlling the robot can cause problems, particularly if the callback itself is not affected by the particular failure that affects GraphNav.
To control whether GraphNav will check for impairment errors when the callback is in control, set the impairment_check field to IMPAIRMENT_SKIP or IMPAIRMENT_CHECK.
Entity Waiting
GraphNav will stop and wait for nearby entities during normal operation, but that behavior may be incorrect for a particular callback, either because the robot should continue past detected entities in this region, or because spurious entity detections are expected in the callback region. This behavior can be controlled by setting the entity_waiting field.
Stop Configuration
Various options can be set in the StopConfiguration message to control how the robot will stop at the start or end of a callback region. Certain callbacks may have particular requirements about what direction the robot should face, or how tightly the robot needs to match the recorded start of the region.
How to write a callback’s run()
The majority of work for an AreaCallbackRegionHandlerBase subclass will be done in the run() method. This function is expected to run for the entire time that the robot is crossing the region. If the function returns early, that will signal to GraphNav that the callback is complete and no longer needs to be updated. Helper methods on the base class are provided to allow run() to block until a particular event it needs to react to.
block_until_arrived_at_start()block_until_arrived_at_end()block_until_control()safe_sleep()
These methods will return when their particular condition is met. If the navigation is aborted, they will raise an exception of a subclass of bosdyn.client.area_callback_region_handler_base.HandlerError. These exceptions do not need to be caught, and can be used to exit from run(). If you do catch these exceptions for performing cleanup work, be sure to re-raise them after cleaning up, rather than continuing on in the run() method. It is expected that run() will complete quickly once navigation has stopped. If your use-case requires more time for cleanup operations you should create a thread to do that work and still return from run() quickly. Note that safe_sleep() works very similar to python’s time.sleep() except that it will raise one of the above exceptions if the navigation through the region aborts during the sleep.
In addition to these blocking methods, implementations can directly call check() which will immediately raise a HandlerError if the callback should abort. Also, the stage() and has_control() helpers can be used to check this information about current stage and control state in a non-blocking manner. stage() will return the bosdyn.api.UpdateCallbackRequest.Stage enum describing the stage of crossing the region.
Aside from the task-specific work that the callback does, its other responsibility is to communicate a two-part policy to GraphNav as to what actions GraphNav should perform at the start and end of the region. The recommended way to set and update this policy is to use the helper methods:
stop_at_start()control_at_start()continue_past_start()stop_at_end()control_at_end()continue_past_end()
The policy can be initially set in the constructor of the handler, and updated in run(). The correct way to continue on after using stop_at_* or control_at_* is to use continue_past_* once the reason for stopping or controlling the robot is complete.
In the area_callback_crosswalk example, the initial policy is set in the constructor to
self.stop_at_start()
self.continue_past_end()
To tell GraphNav that the robot should stop at the start of the region, but after it is past the start, it does not need to stop at the end of the region.
Inside run(), after the callback has verified that it is safe to cross, the callback modifies the policy via its helper method:
self.continue_past_start()
After this call, the policy for the callback will be updated to specify that GraphNav does not need to stop at the start, and it also continues the second part of the policy that it does not need to stop at the end of the region.
Returning from the run() method will signal to GraphNav that the callback is complete, and no longer needs to be updated. GraphNav will continue on past the start and end of the region if it has not already.
Controlling the Robot
Control can be given to the robot to perform an action at the start or end of the region. The common use case for this are to position the robot precisely and perform an action before giving control back to graph nav to cross the region, or to manage the traversal of the entire region itself. Control is acquired by setting the policy to control, and waiting for GraphNav to delegate control. After GraphNav delegates control, the Robot object for the callback will have its lease wallet updated and commands can be sent.
self.control_at_start() # Set region policy
self.block_until_control() # Wait for GraphNav to delegate control
# Can send robot commands here
Updating the localization
If the area callback is traversing the region itself, when it reaches the end of the region it should update the localization of the robot within the map before returning control. The GraphNav considers the callback to still be “at” the start of the region (STAGE_AT_START) until either it drives the robot past the start, or the callback explicitly updates the localization. If the callback drives the robot and tells GraphNav to continue on without updating the localization, then GraphNav will attempt to navigate from the start of the region.
# Commands here driving the robot to the end of the region.
# Update the localization so that GraphNav knows we have traversed the region.
self.set_localization_at_end()
# Change the policy to continue. GraphNav will immediately begin the end policy.
self.continue_past_start()
Reporting Errors
If an unrecoverable error occurs, the run() method should raise an exception. This will get translated into a response to GraphNav that the callback has failed. There are a few special errors that can re-raised with special meaning.
LeaseError - This will be raised when the callback has control if some other system takes over control of the robot. This will generally be raised by robot command RPCs sent by the callback service, and it is recommended to not catch the error, but to instead let it raise out of
run(). If a callback needs to catch it to perform some cleanup, it should re-raise it after that cleanup is performed.PathBlocked - This error should be raised if the callback determines that the region is blocked, and GraphNav should attempt to re-route around it. This should only be raised at the start of the region. If the callback service has been in control of the robot, it should attempt to return to the start of the region before raising this error, or GraphNav may not be able to successfully resume navigation. It should not be raised if the localization has already been updated to the end of the region.
HandlerError - This error will be raised from helper functions if the area callback has already been aborted or exited, and
run()should exit. Handlers should only catch this exception if there is some cleanup to perform before exitingrun().
Handling Re-routing
If the robot is blocked by an obstacle while crossing an area callback, GraphNav may decide to re-plan through the map, and take a different route to the goal.
There are two possibilities of what can happen when this occurs:
The Area Callback is not restarted, but an additional RPC will be made to the callback informing it of the new route. This occurs when GraphNav reroutes during a navigation command.
Most callbacks can ignore that RPC, but callbacks that want to react to it can override the route_changed() method. Be aware route_changed() method will be called from a different thread than the thread that is running the run() method. The return type for route_changed() currently only has a single option which lets the callback request that run() be restarted if it had previously finished. Note that if it restarts, it will already be past the start of the region, so block_until_arrived_at_start() will immediately return False.
The Area Callback is restarted. This occurs when GraphNav is stopped and then re-run with a new command (such as to ask the operator what to do, or because a mission was explicitly paused).
When the BeginCallback RPC is called in the restarting case, the RegionInformation will have the starting_inside_region field set to True. The callback can use this information to skip some of its initial steps if applicable. As an example, if the “spot-crosswalk” callback is starting from inside the crosswalk, it will not try to check that the crosswalk is clear, but will instead immediately start to exit the crosswalk.
Testing an Area Callback
Test runner script
Once a callback is written, it can be tested using the area_callback_test_runner script. This script will call the callback directly, without involving GraphNav. Because GraphNav is not running the callback, certain features may not be available. For example, route and region information will not be filled out in the BeginCallbackRequest, and requesting localization data from GraphNav may not provide meaningful responses. But for many types of Area Callbacks, this test script provides a simple way to make sure that they are operating as expected and to debug failures.
Example usage:
> python3 examples/area_callback/area_callback_test_runner.py --service my-service-name $ROBOT_IP
For detailed instructions of using this runner with an example callback, see the area callback example.