Configuration Requirements
Spot can be configured to carry up to two payloads. The following describes considerations for designing payloads. If designing a payload to be used in conjunction with other payloads, you must keep the total weight of all payloads under 14 kg. A urdf model of the robot and its geometry can be found here.
Payload ports
Spot comes with two payload ports that provide power, communication, time-synchronization, and safety system integration.
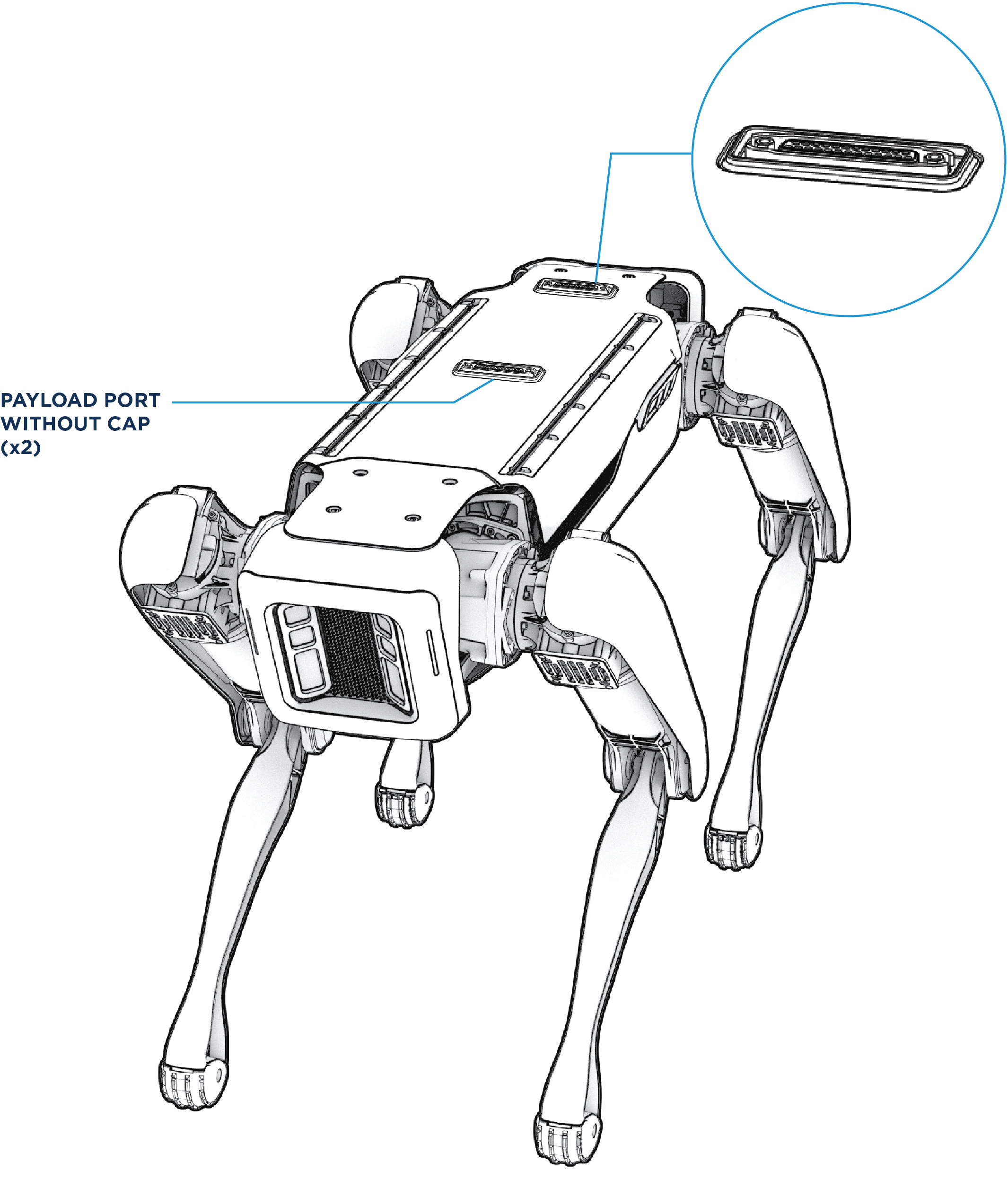
NOTE: Robot will not work without a cap or payload attached to each port.
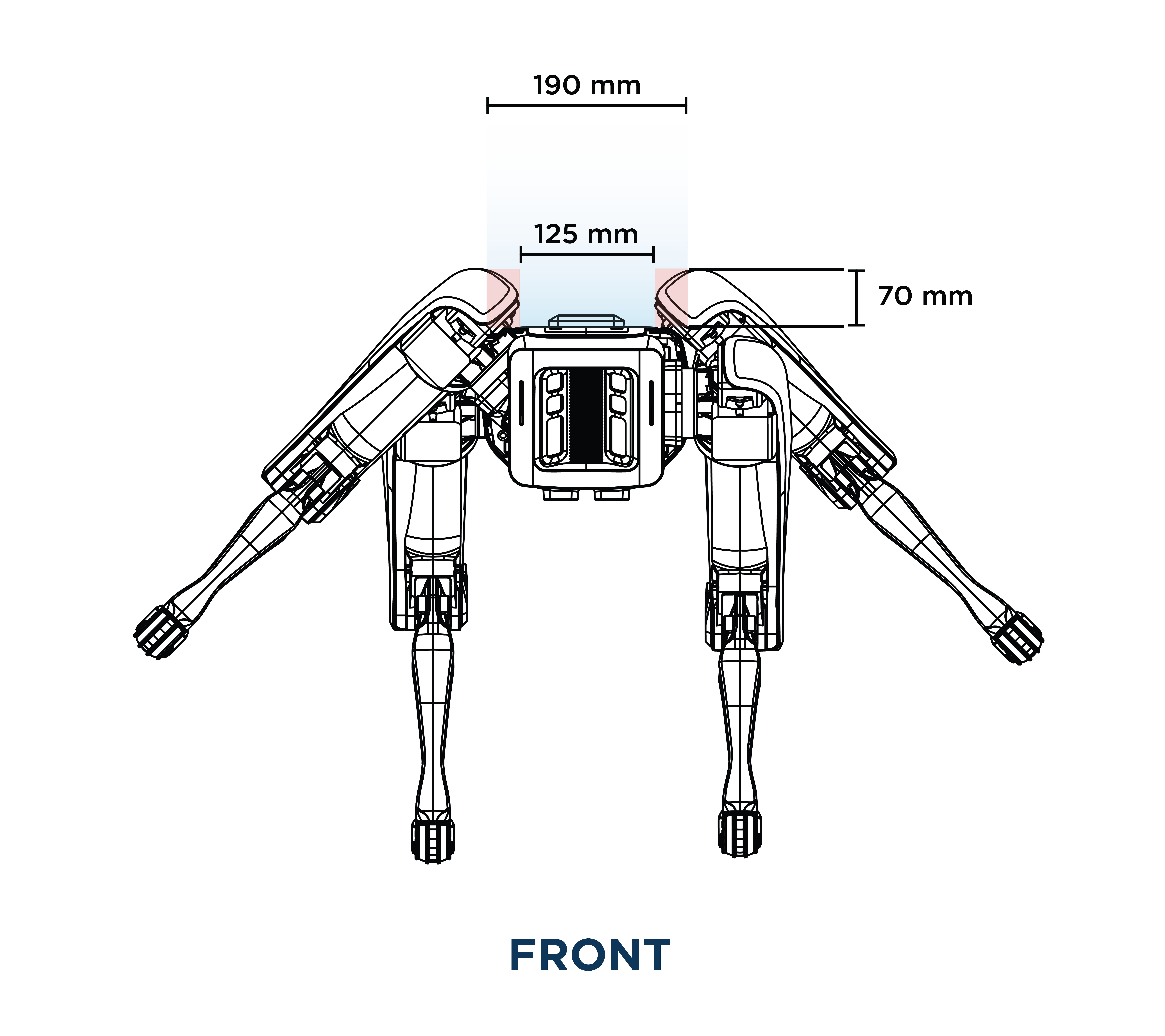
Payload width
The maximum recommended width for a body-mounted payload is 190mm. Wider payloads will result in reduced overall mobility and significant interference with the legs. Payload designers should avoid interference with the robot’s legs as shown above by avoiding the areas immediately adjacent to the robot’s hips.
Designers should include a scallop or elevate the payload enough to create clearance around this section, shown in pink. A 3D STEP model of Spot’s back including payload mounting area detail is available upon request. We recommend that payload developers request and study this model.
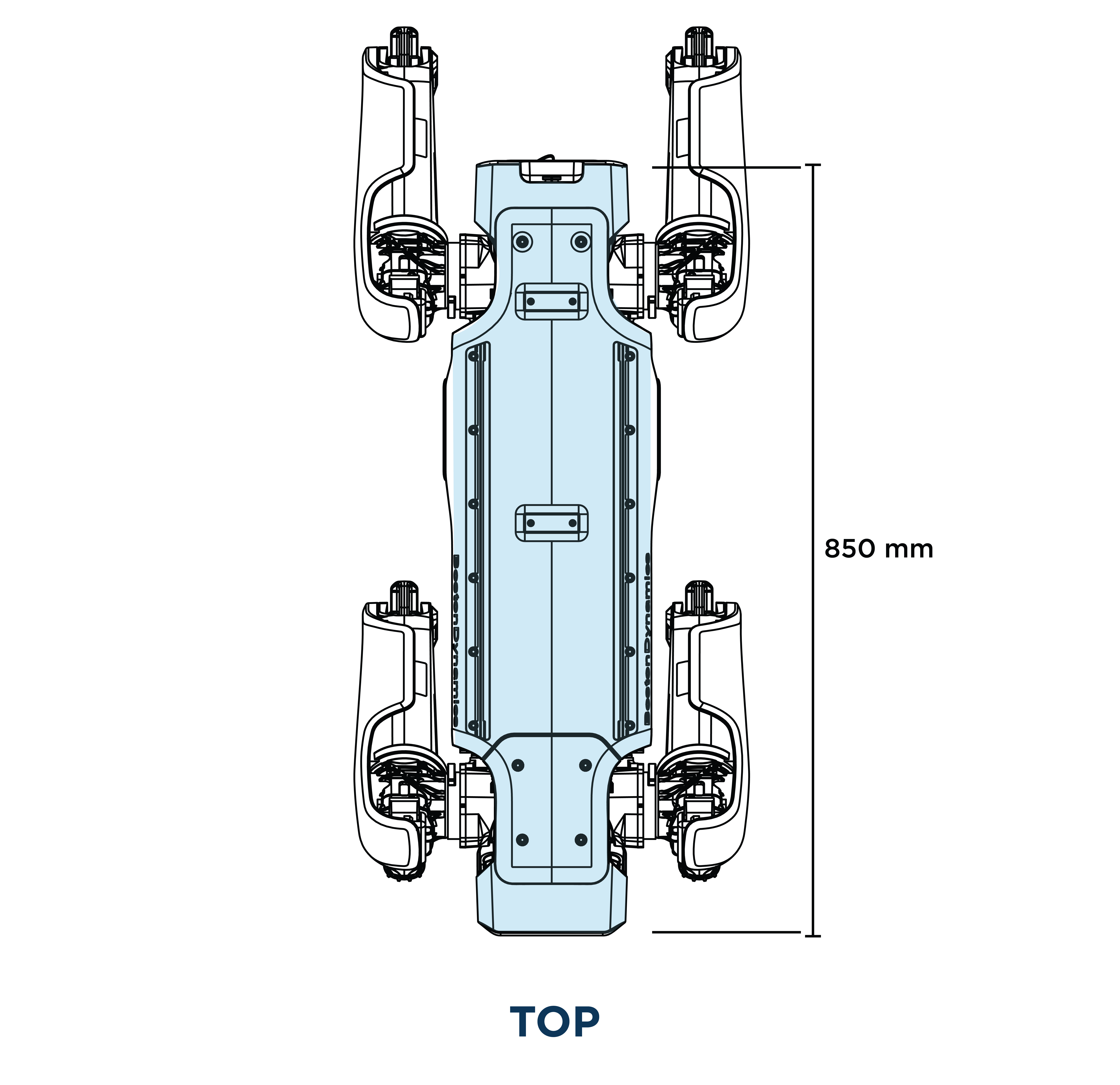
Payload length
Do not overhang the front or rear of the robot as this will reduce maneuverability. In special cases the software can be modified to support larger extents, but we recommend staying inside the given design space.
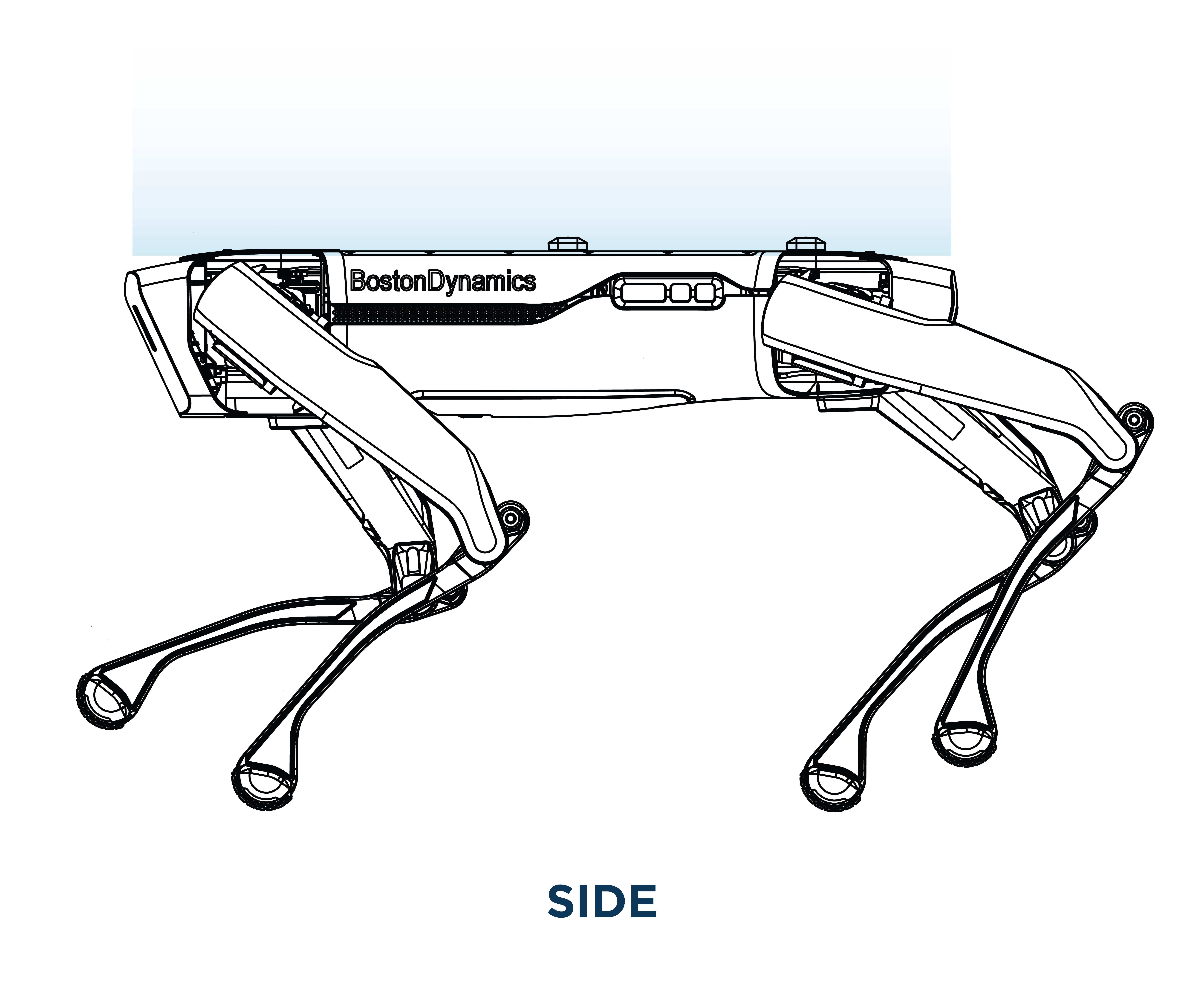
Payload height
The height of the payload impacts the robot’s ability to self-right and increases the height of the center of mass. Keep the center of mass low, as the robot may not self-right if top-heavy.
Payload weight
Spot can support 14 kg total combined capacity distributed over the top of the robot. This total payload capacity must include all payloads. Spot can better handle payload mass if the combined center of mass lies between the front and rear hips. Spot will be more agile and less likely to fall if the total payload mass is centered on the middle of the robot.
Payload leg Interference
Spot’s legs have a very wide range of motion as shown below. When the robot climbs stairs, transitions from sit to stand, and self-rights, the knees may rise above the top plane of the robot where payloads may be mounted. Even with following these guidelines, robot legs might come in contact with a payload. This is considered normal, and payloads should be designed robustly to withstand occasional contact with legs.
Isometric and top views of robot legs ROM
The robot’s legs can extend above and over the robot’s back.
Note: A 3D Step model of the robot’s body including typical leg swing areas is available on the Support Center at https://support.bostondynamics.com/s/article/Defeatured-Spot-CAD-Models.
Payload clearance with robot arm

Payload under arm clearance
NOTE: The Spot Arm weighs 8 kg. Total combined payload weight should be within the 14 kg maximum payload limit.